Da un lato le tecnologie, dall'altro i permessi: a chi sperimenta con le automobili a guida autonoma, o driverless o self-driving, servono entrambe le cose. I più recenti passi avanti sul tema (fra l'altro, al centro dell'edizione del Salone di Ginevra apertasi oggi) riguardano un sistema di mappatura dello spazio che potremmo definire come “visione laser”, studiato dai ricercatori dell'Università di Stanford, e nuove regole appena approvate dal ministro delle Infrastrutture e dei Trasporti Graziano Delrio, con la firma di quello che è stato battezzato come Decreto Smart Road. Il testo, interno al Decreto ministeriale previsto dalla legge di bilancio, apre la porta alla possibilità di sperimentare su strada le tecnologie di guida semiautonoma e autonoma.
Non si tratta solo di mettere a punto automobili che possano sostituire ai guidatori una serie di sistemi di visione, di elaborazione dati e di intelligenza artificiale, bensì bisogna pernsare anche alle strade e alle infrastrutture di connettività. Oltre a misure indirizzate a snellire il traffico, ridurre gli incidenti e migliorare la rete autostradale, il decreto apre la porta alla sperimentazione dei veicoli driverless su strada: potranno fare richiesta per ottenere il permesso sia i costruittori di automobili, sia le università, sia enti di ricerca pubblici e privati. Nel testo sono previsti, poi, interventi infrastrutturali che dovranno garantire connettività ai veicoli: fibra ottica, sistemi di routing verso le reti mobili, hotspot WiFi nelle aree di servizio e parcheggio, sistemi di rilevamento del traffico e delle condizioni meteo.
In una prima fase, da qui al 2025, questi lavori riguarderanno le reti di trasporto stradale trans-europee (Ten-T) e dunque le autostrade, mentre in un secondo momento saranno estesi al Sistema Nazionale Integrato dei Trasporti (Snit). Il traguardo della California, regione fra le più digitalizzate al mondo e pronta ad accogliere sulle proprie strade pubbliche i primi test di vetture senza conducente, per l'Italia è ancora lontanissimo. Ma la strategia di trasformazione tecnologica dei nostri trasporti, se non altro, è stata tracciata.
Sempre di automobili senza conducente si è parlato con la pubblicazione su Nature, ieri, di uno studio realizzato da ricercatori dell'Università di Stanford (da cui è tratta l'immagine in alto e quella qui sotto). Il lavoro, completato nell'agosto dell'anno scorso, è più attuale che mai: descrive una tecnologia che potremmo banalmente etichettare come “visione laser di oggetti nascosti” e che in realtà si chiama “produzione di immagini confocale senza linea di visione basata sulla trasformazione del cono di luce”. Una tecnologia utile non soltanto nei sistemi di visione computerizzata delle future automobili driverless, ma anche in campo medico (nella diagnostica per immagini), militare, nella robotica, a bordo di velivoli destinati a interventi di soccorso e in altri ambiti ancora.
In parole semplici, l'idea è quella di poter “guardare oltre gli ostacoli”, permettendo per esempio a un'automobile di sapere che cosa ci sia dietro l'angolo ancor prima di svoltare e dunque aiutando il sistema di guida a evitare urti con oggetti, animali, persone. Il funzionamento non è una novità: proiettando un raggio laser in uno spazio, è possibile ricostruire l'immagine del corpo copito in base alla luce che rimbalza sull'oggetto in questione. Un rilevatore di fotoni determina l'angolazione e la velocità delle onde luminose e sulla base di tali dati un algoritmo può ricostruire l'immagine del corpo nascosto.
Sistemi basati su impulsi laser, rilevatori di fotoni e algoritmi già esistono, ma finora il loro funzionamento è stato penalizzato da un problema di “rumore”, cioè dall'eccesso di interferenze luminose. Inoltre l'imaging senza linea di visione, scrivono i ricercatori, “nonostante i recenti progressi, è finora rimasto poco praticabile a causa dei proibitivi requisiti di memoria e di calcolo degli algoritmi e dall'estrema debolezza del segnale” luminoso.
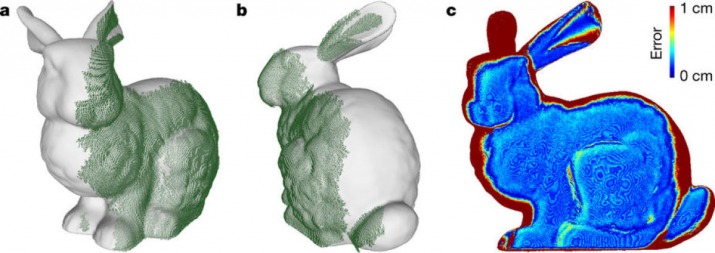
L'immagine bianca corrisponde all'oggetto reale, i puntini verdi sono ciò che il sistema rileva (sul lato del coniglio colpito dal raggio laser)
Con il nuovo metodo, invece, i dati impressi sul rilevatore di fotoni vengono inviati a un computer e processati dall'algoritmo messo a punto dai ricercatori, il quale nel giro di un paio di secondi può ricostruire l'immagine in modo efficiente e con un'elevate fedeltà. Rispetto ai precedenti sistemi, questo è meno sensibile alle interferenze luminose e dunque più adatto a funzionare in contesti di piena luce, come la guida su strada in ore diurne. C'è però ancora un grosso limite: il tempo. Per la raccolta dei dati è necessaria circa un'ora, e non le frazioni di secondo utili per reagire a un ostacolo in mezzo alla carreggiata o alla comparsa improvvisa di un pedone prima di una svolta. Si potrà superare questo problema con l'utilizzo di laser scanner che siano compatibili con i sistemi Lidar usati nelle automobili. La teoria c'è, insomma, ma l'hardware non è ancora pronto.